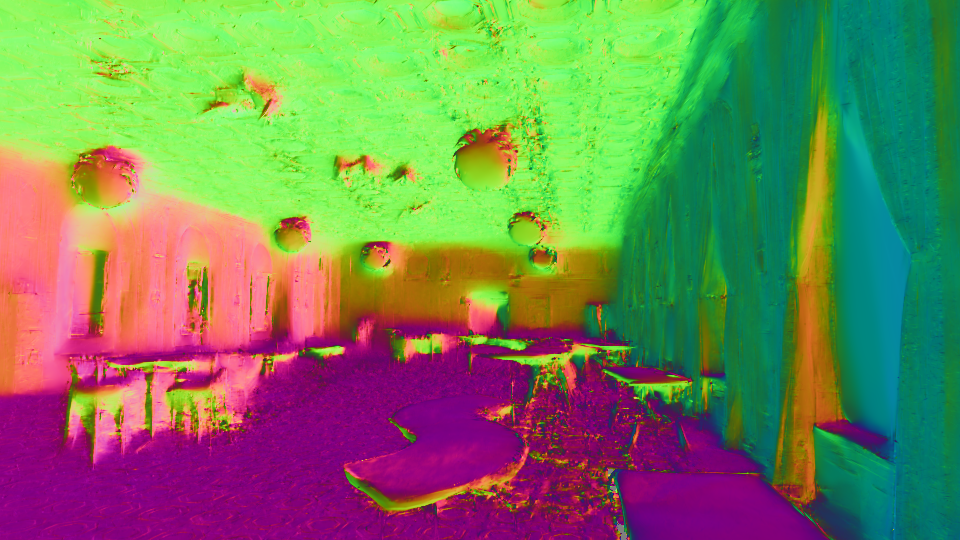

2D-GS + Ours
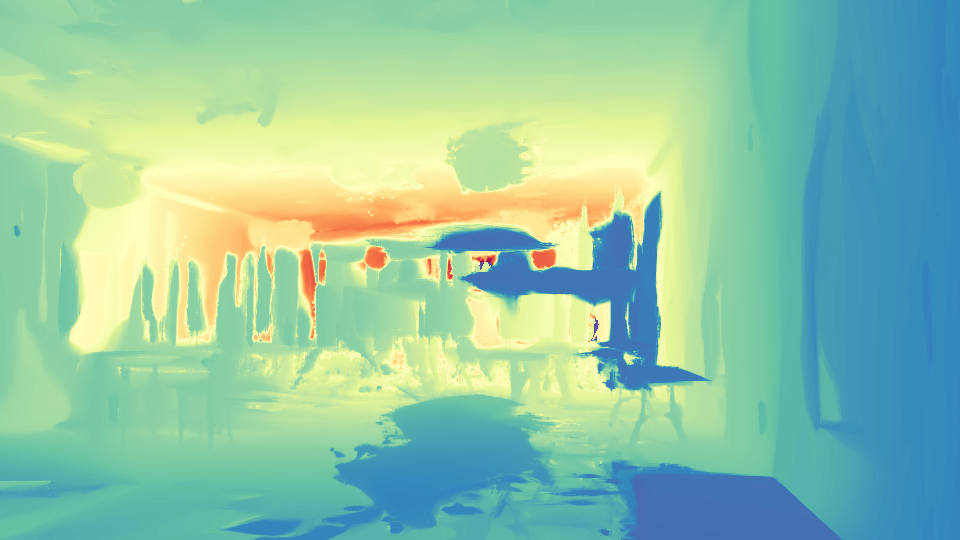
2D-GS [Huang 2024]
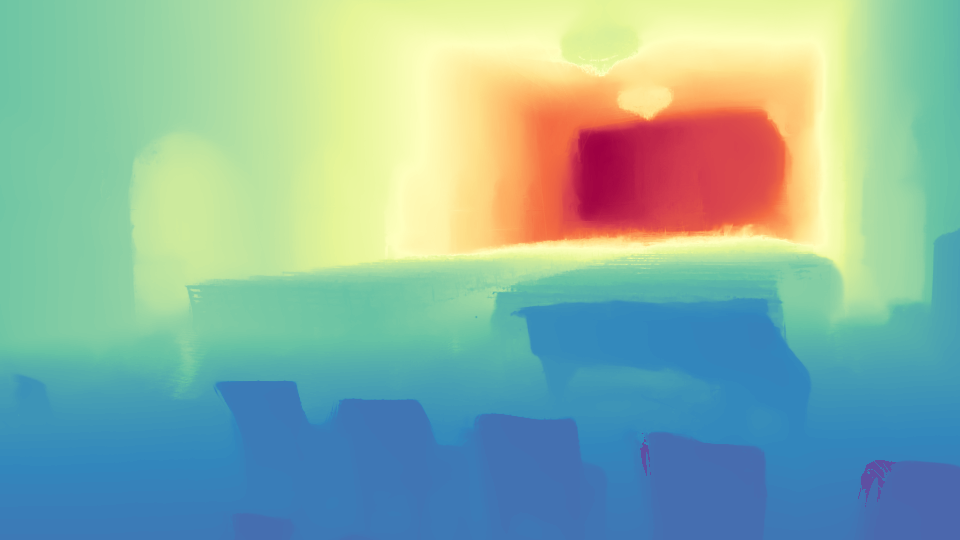
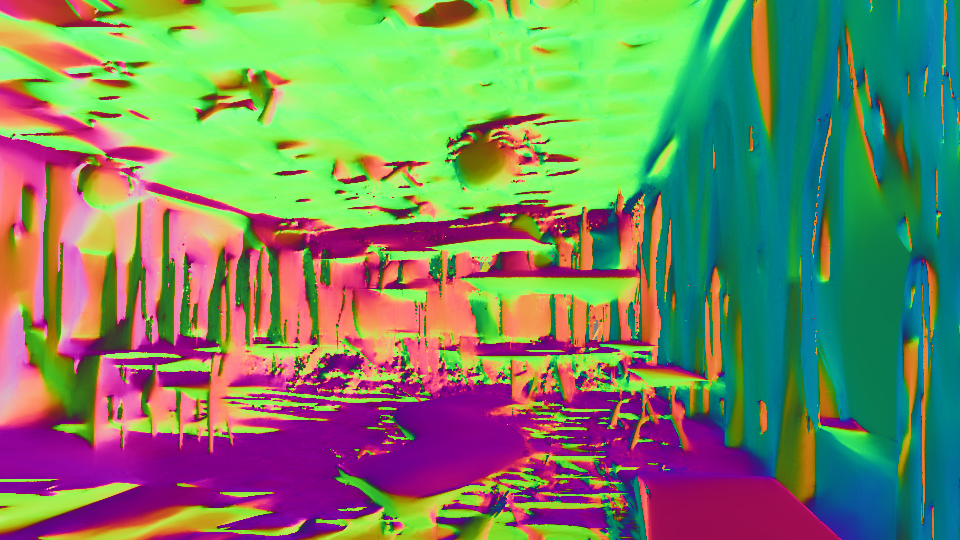
2D-GS + Ours
2D-GS [Huang 2024]

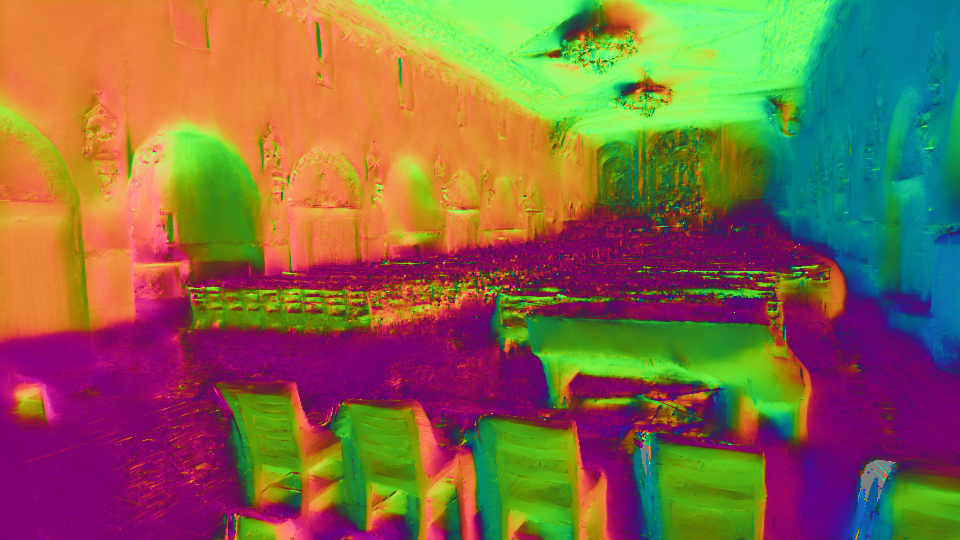
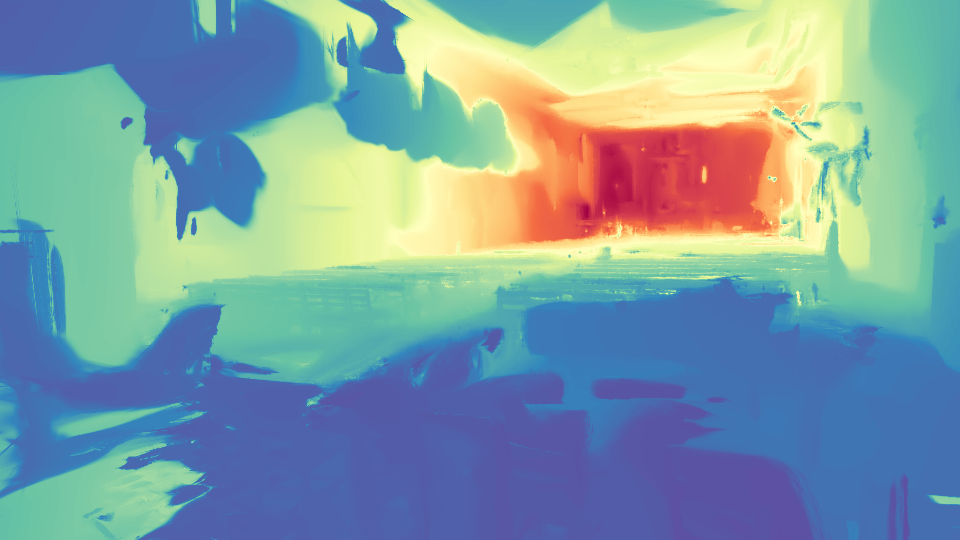
Ours

CF-3DGS [Fu 2023]

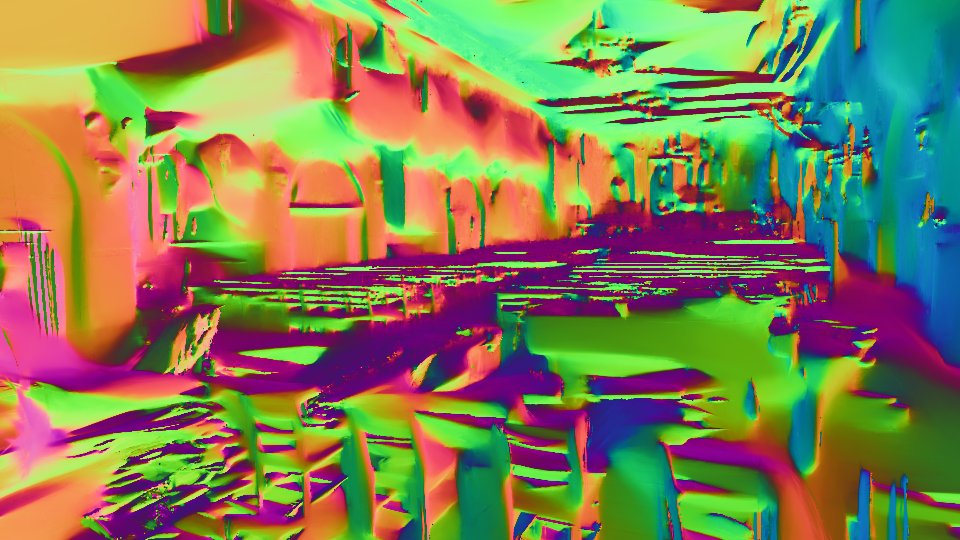
Ours

Nope-NeRF [Bian 2022]

Ours

NeRFmm [Wang 2021]